
Método de sintonia de ganhos de controladores PID (proporcional integral derivativo)
- 12 de ago. de 2015
- 5 min de leitura
Sumário
•Introdução
•Sistemas de Controle
•Sistemas com e sem realimentação
•Controladores PID
•Ação Proporcional (P)
•Ação Integral (I)
•Ação Derivativa (D)
•Métodos de sintonia de controladores PID
•Método de Ziegler-Nichols
•Exemplo de sintonia de um controlador PID utilizando o Método de Ziegler-Nichols
•Introdução
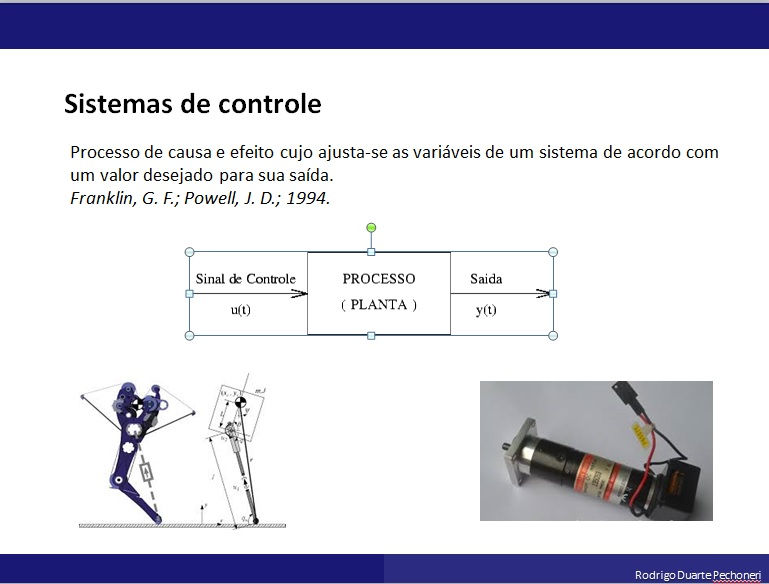
O projeto de sistemas de controle consiste em buscar tornar o comportamento de saída do seu sistema ajustada para as características desejadas no projeto de acordo com a estimulação da entrada. Em outras palavras, é o processo de adequar o comportamento dinâmico de saída do seu dispositivo ao estimulo de entrada com características previstas no processo de projeto e para isso são usados os famigerados e salvadores controladores de processo ou apenas controladores, que empregam metodologias matemáticas e de física, além de engenharia e computação em seu processo de desenvolvimento e fazem uso de diversas formas tecnológicas em sua implementação. Podemos encontrar controladores mecânicos, elétricos, eletrônicos, computacionais ou uma simbiose entre eles.

Em sistemas de controle podemos desenvolver sistemas de malha aberta que são nada mais nada menos que colocar o valor desejado de setpoint (valor de referência) no seu sistema e obter um resultado na saída que pode ou não ser o valor desejado. Por exemplo, para acionar o motor de sua furadeira você possui um potenciômetro (Gatilho), um amplificador de sinal (controlador) e um motor (atuador), você ajusta a velocidade de saída do seu motor com a tensão proporcional do seu potenciômetro, que é amplificado e serve de referência para a velocidade do motor, que gira a broca, embora a broca esteja sempre girando com esse sinal sendo aplicado, não temos a certeza se a velocidade da broca é realmente proporcional à velocidade que queríamos no ajuste do gatilho, mesmo assim ela cumpre com sua tarefa de furar o objeto, isso é uma malha aberta, pois não temos uma amostra da saída sendo comparada com o valor desejado, logo podendo assumir valores diferentes, mas ainda assim cumprindo o objetivo final desejado para o sistema. Porém, em sistemas mais sofisticados que necessitamos de saídas controladas que fique o mais próximo possível do setpoint, surge a necessidade do controle em malha fechada, que pega uma amostra do valor da variável de saída que está sob controle e compara com seu valor desejado, resultando em uma diferença, esta diferença é usada pelo controlador de malha fechada para ajustar o valor de sinal do atuador de modo a corrigir o valor da saída real e tender a zero a diferença entre o valor real encontrado na saída do sistema e o valor desejado para ela. Por exemplo, o mesmo exemplo da furadeira só que agora você colocou um tacômetro na saída do motor e conectou a entrada diferencial do seu amplificador.

Um controlador PID pode ser visto como a soma dos três termos: proporcional ao erro, integral do erro e derivado do erro, sendo o erro a diferença entre valor desejado para a saída do sistema e valor medido dela. Esse tipo de controlador "prevê" com base nessa medida da saída a ação de resposta, o passado representado pela integral do erro, o presente pelo proporcional, e o futuro pela extrapolação linear do erro (derivada). Um controlador PID é muito prático e capaz de resolver muitos problemas de controle industrial, embora muitas vezes aplique-se apenas a ação integral e proporcional.
Existem muitos outros tipos de controladores diferentes do PID que usam métodos mais sofisticados de abordagem, como o controle robusto, adaptativo, multi variáveis, inteligência artificial, etc... Porém, os controladores tipo PID vem ao encontro de diversas aplicações reais no dia a dia do engenheiro.

A ação proporcional prove um ganho ao valor de erro, ela amplifica o sinal de amostra da saída de maneira a levar o sistema a se aproximar do setpoint, porém aumentando significativamente sua característica dinâmica com o aumento de sobre sinal e resposta oscilatória.

A ação integral ao erro com base no valor anterior de saída tende a minimizar o erro, ou seja, é ela quem deixa em níveis aceitáveis a diferença ente nosso valor de saída desejado e nosso setpoint, ao custo do aumento de sobre sinal e o tempo em que o sistema leva para atingir seu regime, ou seja, aumenta o tempo que a saída leva para estabilizar.

A ação derivativa serve como um filtro para a ação PI, ou seja, é ela que equilibra o aumento de sobre sinal e diminui o tempo de acomodação do sistema, porém seu aumento demasiado pode levar o sistema a instabilidade e saturar a saída. Sua ação age sobre a taxa de variação do erro, ou seja, ela age sobre o erro que virá melhorando a característica de tempo de resposta em sistemas de resposta lenta a excitação.

Quando trabalhamos com controladores PID, tudo é lindo, porém nos deparamos com o problema de sintonizá-los, ou seja, encontrar os valores de ganho de P, I e D que satisfaça nossos requisitos de projeto. Na literatura e internet podemos encontrar diversas formas de fazê-lo com ou sem o conhecimento prévio do modelo matemático da planta a ser controlada.
Entre elas uma muito usada na prática quando não possuímos o modelo de nosso processo é o método de Ziegler Nichols.

Em 1942, dois engenheiros desenvolveram um método empírico baseado em normalização de resposta dinâmica e assim definiram, para sistemas de resposta em primeira ordem e segunda ordem, um conjunto de medidas e parâmetros com base na resposta medida do sistema encontrar um valor inicial para cada parâmetro do controlador e depois com muita paciência e vivência ajustar refinadamente os ganhos.

Usaremos neste tutorial a sintonia de um controlador de laser de diodo como exemplo de aplicação do método de sintonia de PID de Ziegler-Nichols

O sistema de controle de temperatura de um LASER possui um controlador analógico do tipo (PID), um atuador Peltier e um sensor de temperatura do tipo termistor.

Para este experimento utilizamos um osciloscópio, o laser, a fonte de alimentação, e seu driver de controle que encontram-se suas placas de controle.

O método de Ziegler-Nichols define que devemos levar o sistema ao limite da estabilidade e encontrar dois parâmetros o ganho crítico (Kcr) e período critico (Pcr), após, aplicamos os valores padrão de sua tabela que está adequada ao modelo matemático de nosso controlador PID.

O primeiro passo de nosso processo de sintonia é desligar ou zerar os ganhos dos controladores I e D, deixando apenas o controle proporcional atuar sobre o sistema.
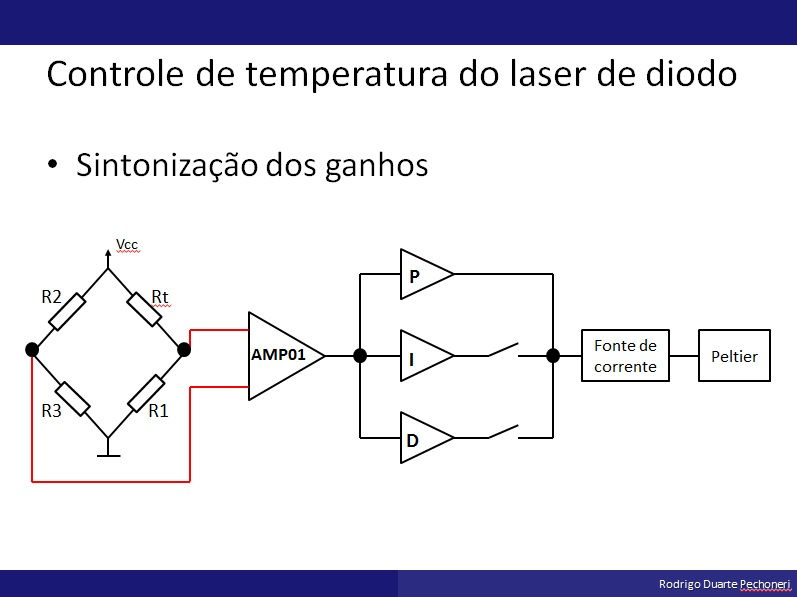
Com o sistema ligado e o termistor em uma ponte de wheatstone, abrimos os controladores I e D e fechamos o controlador proporcional.

Ajusta-se o valor do ganho proporcional até que o sistema passe a oscilar com amplitude e período constantes, analisamos a resposta de saída do sistema com o osciloscópio, essa medida é realizada na entrada diferencial do comparador entre setpoint e valor de erro.

Anota-se o período da oscilação (Pcr) e o valor de ganho proporcional aplicado (Kcr).

Com os valores de ganho proporcional crítico e período crítico usamos a tabela e determinamos os valores de Ti tempo de integração e TD tempo de derivação. Esses valores agora serão ajustados em nosso circuito de PID.

Usando nossos valores de ganho e conhecendo nosso circuito de PID, calculamos os valores de capacitores e resistores para o circuito que ajustam esses ganhos, lembrando que na figura omitimos a parte do amplificador diferencial de entrada e colocamos direto o sinal de erro, por uma questão didática. O cálculo dos valores de componentes está baseado no estudo de circuitos de malha fechada com amplificadores operacionais.
Aqui a resposta dinâmica de nosso controle, á partir dela agora podemos refinar a resposta do controle experimentando ajustes finos nos ganhos do controlador.

Comentários